
Find the Brick
Aufgabenstellung
Ziel ist es, dass ein Roboter einen in der Arena aufgestellten Ziegelstein findet, auf diesen zufährt und nach einer Berührung das Finden des Ziegelsteins durch ein akustisches Signal anzeigt.
Wettbewerbs-Arena
Die Wettbewerbs-Arena hat eine Größe von 150cm x 120cm und ist in Quadrate von 30cm x 30cm unterteilt.
Der Boden der Arena ist weiß, am Rand ist die Arena von einer schwarzen Linie begrenzt – diese ist mit schwarzem Isolierband aufgeklebt.
Als Boden eignet sich weißes Papier, weißer Karton oder am besten eine weiß beschichtete Hartfaserplatte, wie sie in jedem Baumarkt oder bei einem Tischler erhältlich ist.
Die Unterteilungslinien der 30cm x 30 cm Quadrate sind mit Bleistift aufgezeichnet.
Der Ziegelstein steht senkrecht auf einem der 6 inneren Quadrate. Die Farbe des Ziegelsteins ist nicht festgelegt.
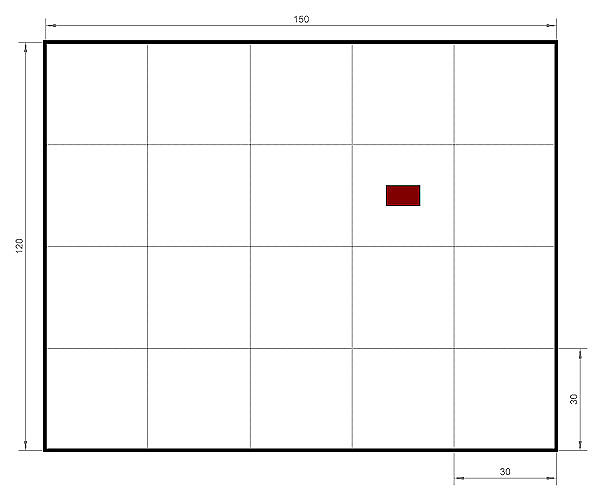
Abmessungen der Wettbewerbsarena mit dem Ziegel
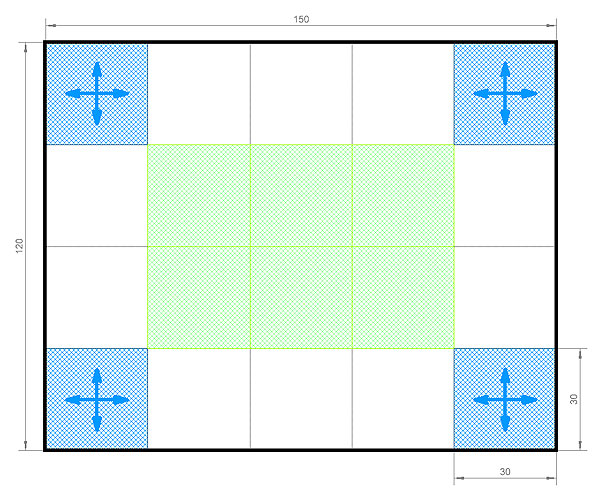
Wettbewerbsarena mit allen möglichen Startfeldern und Startichtungen (blau)
und allen möglichen Feldern, auf denen der Zeigel stehen kann (grün)
ACHTUNG: blaue und grüne Schraffierung nur in dieser Zeichnung,
in der tatsächlichen Arena haben die Felder einen weißen Hintergrund
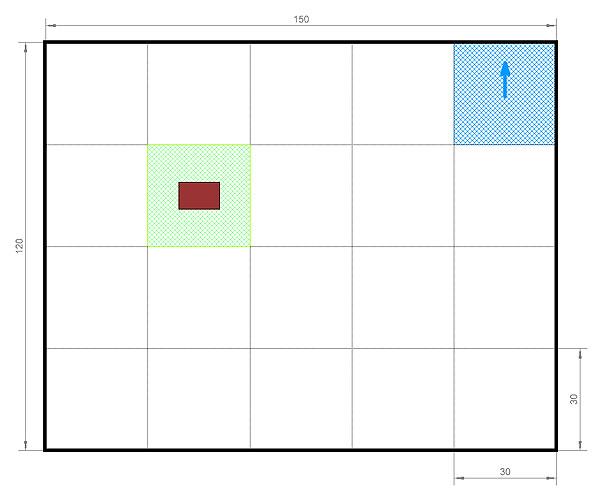
Wettbewerbsarena mit einer möglichen Ausgangssituation: Startfeld (blau)
und das Feld auf dem der Zeigel steht (grün)
ACHTUNG: blaue und grüne Schraffierung nur in dieser Zeichnung,
in der tatsächlichen Arena haben die Felder einen weißen Hintergrund
Regeln
Ein Team besteht aus 2 – 4 Mitgliedern. Ein Teammitglied wird als Teamleader nominiert.
Der Roboter darf nur in Bezug auf Sensorik und Aktoren nur mit den Komponenten eines Basissets aufgebaut werden (1 NXT/EV3-Brick, 1 Ultraschallsensor, 1 Lichtsensor, 2 Tastsensoren, 3 Motoren, 1 Gyrosensor).
Der Roboter muss auf seiner Oberseite einen Griff besitzen mit dem der Schiedsrichter den Roboter aufheben kann ohne die Konstruktion zu beschädigen und darf eine maximale Größe von 25 cm x 25 cm (Grundfläche) haben.
Der Teamleader bereitet den Roboter vor der Wettbewerbsfahrt vor und wählt vor der Wettbewerbsfahrt das entsprechende Programm am NXT/EV3 Brick aus.
Anschließend wird durch Würfeln das Startfeld und das Feld mit dem Ziegelstein bestimmt
Der Schiedsrichter setzt den Roboter auf das Startfeld und startet das Programm durch einen Druck auf die entsprechende Taste auf dem NXT/EV3 Brick.
Verlässt der Roboter die Arena (alle Räder außerhalb der schwarzen Linie), wird der Roboter vom Schiedsrichter ohne erneutes Starten des Programms wieder auf das Startfeld gestellt.
Wertung
Die detaillierte Wertung ist im jährlich veröffentlichten Regelwerk beschrieben.