
Sensoren
Taster
Bei dem Tastsensor handelt es sich um einen Mikroschalter, der an einem der 8 IO-Ports von KeplerBRAIN angeschlossen wird.

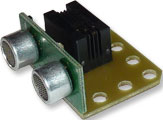
Abstandssensor SRF10
Dieser Sensor misst die Entfernung zu einem Objekt mittels Ultraschall. Es handelt sich um einen I2C-Sensor, welcher an einem der I2C-Ports angeschlossen wird.
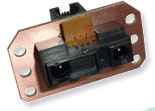
Abstandssensor SHARP GP2D12
Die Messung der Distanz erfolgt bei diesem Sensor durch infrarotes Licht. Als Ausgangssignal liefert dieser eine analoge Spannung zwischen 0 und 5 V. Der Anschluss erfolgt an einen der 8 IO-Ports, der Mikroprozessor misst über seinen integrierten AD-Wandler die Spannung, welche dann in Entfernungswerte umgerechnet werden kann. Der GP2D12 kann Entfernungen zwischen 10 und 80 cm messen.
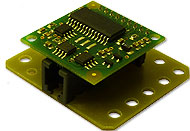
Kompass CMPS03
Das Kompassmodul CMPS03 liefert eine Richtungsangabe zwischen 0° und 360° aufgrund seiner Ausrichtung im Erdmagnetfeld. Der Sensor wird an einen beliebigen I2C-Port von KeplerBRAIN angeschlossen.
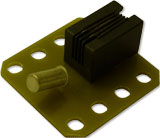
Neigungssensor
Der Neigungssensor kann eingesetzt werden um auf Lageänderungen eines Roboters zu reagieren. Es handelt sich dabei um einen Schalter, der bei Überschreiten eines einstellbaren Winkels einen Kontakt auslöst. Der Anschluss erfolgt an einen der 8 IO-Ports.
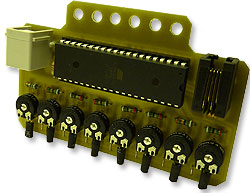
Liniensensor
Um komplexe Aufgabenstellungen (Unterbrechungen, rechte oder spitze Winkel) beim Verfolgen einer Linie zu lösen reicht ein einfacher Lichtsensor mit ein oder zwei Reflexionssignalen meist nicht aus. Dieser Sensor bietet auf einer Distanz von 10 cm die Möglichkeit den Boden mit 8 Reflexions-Sensoren abzutasten.
Damit der Einfluss von Umgebungslicht auf die Messungen soweit wie möglich reduziert werden kann, wird jeder abgetastete Bereich mit einer superhellen, weißen Led ausgeleuchtet. Zusätzlich besteht die Möglichkeit, die Empfindlichkeit jedes einzelnen der 8 Sensoren über ein Potentiometer individuell anzupassen.
Die Kommunikation mit der Hauptplatine erfolgt über einen I2C-Port. Zusätzlich verfügt dieser Sensor über eine original Lego Mindstorms Buchse, wodurch dieser auch an einen NXT-Brick angeschlossen werden kann.
Bodensensor
Zum einfachen, optischen Abtasten des Bodens unter einem Roboter beleuchtet dieser Sensor den Untergrund mit einer superhellen, weißen Led und liefert die Stärke des reflektierten Lichts als Messwert. Die Empfindlichkeit kann mit einem Potentiometer an die jeweiligen Bedingungen optimal angepasst werden. Der Sensor liefert eine Ausgangsspannung zwischen 0 und 5 Volt und wird an einen der 8 IO-Ports angeschlossen, der in diesem Fall als analoger Eingang konfiguriert wird.

Wärmesensor
Der Wärmesensor kann dazu verwendet werden um Temperaturänderungen zu erfassen. Die Messung erfolgt über einen IR-Temperatursensor, der eine analoge Ausgangsspannung liefert und somit an einen der 8 IO-Ports angeschlossen wird. Um den Sensor an die jeweiligen Anforderungen und Umgebungsbedingungen anzupassen, kann die Empfindlichkeit mit einem Potentiometer eingestellt werden.
